انواع الگوریتم فیلتر سازی داده های لیدار
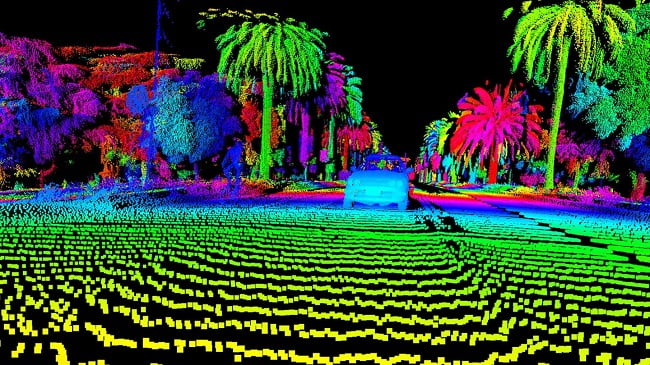
یک سیستم لیزر اسکنر هوایی، یک سیستم فعال سنجش از دوری می باشد که پالسهای لیزر را به سمت عارضه فرستاده و بازگشت آن را ثبت میکند.
این تکنولوژی علاوه بر ثبت اطلاعات ارتفاعی توانایی ثبت اطلاعات چند بازگشتی و همچنین اطلاعات شدت را نیز دارا می باشد.
تصاویر لیدار شامل دو مجموعه داده ی جداگانه هستند که هر دو در قالب یک فایل با پسوند .LASیا .LAZ (حالت فشرده .LAS) ارائه میشوند.
یک مجموعه داده شامل داده های ارتفاعی (تصاویر حاصل از تبدیل مقادیر این مولفه به درجات خاکستری) و داده شدت موج مربوط به موج بازگشتی است.
داده ها لیدار در ابتدا به صورت نقاطی نامنظم و پراکنده در فضای سه بعدی هستند که با نام ابر نقاط شناخته می شوند و نمی توان آنها را با فواصل معین بر روی صفحه تصویر کرد.
زیرا فواصل هر نقطه برداشت شده از نقاط مجاور متغیر است .
این تغییرات بدلیل رنگ،بافت،میزان زبرییا صیقلی بودن عارضه، زاویه سطح تابش و فرکانس لیزر می باشد. محدوده عدد شدت از ۰ تا ۲۵۵ گزارش می شود.
اولین گام پروسه داده های لیدار فیلتر سازی داده ها یا همان جداسازی نقاط متعلق به زمین لخت از نقاط متعلق به عوارض است .
از آنجا که استخراج زمین لخت از داده های لیدار به صورت دستی امری زمان بر و پرهزینه است به منظور فیلتر کردن داده های لیدار روش های مختلفی مانند فیلتر شیب مبنا ، فیلتر مورفولوژیکی ، فیلتر بر مبنای آماری ، فیلتر بر مبنای TIN ، فیلتر منحنی مبنا، فیلتر با مبنای بخش بندی یا خوشه بندی ، فیلتر بر اساس الگوریتم های هوشمند و فیلتر هیبرید وجود دارد.
در این مقاله به الگوریتم های فیلتر سازی و فرضیاتی که این الگوریتم های فیلترسازی بر پایه آن ها بنا نهاده شده اند می پردازیم.
[box type=”shadow” align=”” class=”” width=””]مطلب پیشنهادی:سنجش از دور چیست و کاربرد های آن[/box]
الگوریتم های فیلتر سازی داده های لیداری
فیلتر های مشخصی برای داده های لیدار وجود دارد که در ادامه بر هرکدام از آنها پرداخته می شود.
الگوریتم سطح سلسله مراتبی
در این الگوریتم ( K.Kraus , N.pfeifer , C.Briese:1998) که به روش سلسله مراتبی عمل می کند فرض بر این است که زمین لخت را می شود مجموعه ای از سطوح پیوسته پوشش دار با ابعاد کوچک تر در نظر گرفت برای حذف نقاط ، یک سطح را بر روی ابر نقاط لیدار برازش دادند و بوسیله یک الگوریتم تکراری کمترین مربعات ، نقاط بالای این سطح برازش شده را تا حدامکان کاهش دادند .
الگوریتم تراکم TIN تصاعدی
فرض این الگوریتم (P.Axelsson:1999) بر این است که زمین به صورت محلی و کلی هموار است.
در این روش ابتدا یک TIN پراکنده از مینیمم همسایه ها ایجاد می شود . این TIN اولین تخمین از زمین لخت است.
سپس در مرحله تکراری این TIN بطور فزاینده با ابر نقاط لیزر متراکم می شود . در هر تکرار اگر نقطه ضوابط مشخصی را در رابطه با مثلثی که حاوی آن است بدست آورد، به TIN افزوده می شود.
الگوریتم شیب مبنا
الگوریتم شیب مبنا (Vosselman:2000) از موثر ترین الگوریتم هایی است که تا کنون ارائه شده پایه بسیاری ازالگوریتم هایی است که تاکنون ارائه شده و پایه بسیاری ازالگوریتمهای دیگر است.
در این الگوریتم فرض بر این است که گرادیان در زمین لخت محدود است.
این فیلتر برمبنای مفاهیم مورفولوژی ریاضی استوار است و ساختار هندسی محلی زمین لخت را با استفاده از المان ساختاری فرضیه درباره بیشترین اختلاف ارتفاع بین هردونقطه بر زمین لخت با توجه به فاصله بین آنها انجام می دهد.
الگوریتم فیلترشیب تطبیقی
فرض در این الگوریتم (Dsithole&G.Vosselmsn : 2001) بر این است که گرادیان هادر زمین لخت بصورت محلی محدود می باشند. این فیلتر ویرایشی از فیلتر های شیب مبنا است که در آن به منظور عملکرد بهتر الگوریتم در مناطق شیب دار ، شکل المان ساختاری با شیب زمین لخت تطبیق داده می شود .
الگوریتم فیلتر مبتنی برشیب تطبیقی
در این الگوریتم (M.Roggeri:2001) نیز فرض بر این است که گرادیان ها در زمین لخت بصورت محلی محدودند.
در این فیلتر که ویرایش دیگری از فیلتر بر مبنای شیب است ، شکل المان ساختاری باشیب زمین لخت در نقطه مورد نظر وفق پیدا می کند.
در این الگوریتم زمین لخت با استفاده از ضوابط رگرسیون خطی محلی تخمین زده می شود .
الگوریتم مدل حد فاصل فعال
فرض در این الگوریتم(M.elmqvist:2001) بر این است که زمین لخت را می شود بصورت مجموعه ای ازسطوح پیوسته پوشش دار با ابعاد کوچک در نطر گرفت.
این الگوریتم با بکارگیری مدل های فعال، سطح زمین را تخمین می زند.
الگوریتم خوشه بندی مبتنی برلبه
فرض دراین الگوریتم (M.Brovelli:2002)براین است که نقاطی که در لبه های بسته قرار دارندمتعلق به عوارض هستند.
الگوریتم با در نظر داشتن این که عوارض لبه های واضحی دارند و در کنار یکدیگر مرز بسته ای را تشکیل می دهند، اقدام به شناسایی نقاط مربوط به عوارض می کند.
این روش در قالب رستر کار می کند و در آن از تکنیک رشد ناحیه استفاده شده است.
این روش همچنین از اختلاف بین پالس اول و پالس آخر برای بهبود نتایج استفاده می کند.
الگوریتم حداقل طبقه بندی بلوک
این الگوریتم (R.Wack&A.Wimmer :2002) فرض می کند پایین ترین نقطه یک همسایگی به زمین لخت تعلق دارد .
در این الگوریتم المان های رستری عوارض به روش سلسله مراتبی نمایان می شوند ، بدین ترتیب که ابتدا یک DEM با قدرت تفکیک پایین ازابر نقاط خام تولید می شوند، سپس در مرحله بعد با استفاده از عملگر لاپلاس گوسی عوارض شناسایی و حذف می شوند.
این DEM مبنایی برای محاسبه DEM با قدرت تفکیک بالاتر قرار می گیرد و فرآیند فوق تا رسیدن به DEM نهایی تکرار می شود.
[box type=”shadow” align=”” class=”” width=””]مطلب پیشنهادی:قدرت تفکیک تصاویر ( رزولویشن )،انواع قدرت تفکیک[/box]
الگوریتم تراکم TIN تصاعدی
فرض در این الگوریتم (Rigularization Method G.sohn:2002) بر این است که زمین لخت بصورت محلی و کلی هموار است این الگوریتم دارای دو مرحله متراکم سازی تصاعدی یک TIN است . نقاط داخل TIN در پایان متراکم سازی بعنوان نقاط زمین لخت و نقاط خارج آن بعنوان عارضه در نظر گرفته می شوند.
الگوریتم بازیابی سلسله مراتبی زمین
فرض در این الگوریتم (y.Hu:2003) بر این است که در هرم تصاویر که از داده های لیدار ساخته می شود ، تصاویر در بالاترین سطح یک DTM تقریبی است.
الگوریتم نقاط زمینی را با یافتن مینیمم محلی و سایر نقاط توپوگرافیک مشخص می کند و سطح زمین را بازیابی می نماید .
الگوریتم ابرهای تقسیم شده
فرض در این الگوریتم (G.Sithole:2005) بر این است که بعد از قطعه بندی ابرنقاط ، قطعات متعلق به عوارض بالاتر از همسایگانشان قرار دارند.
در این الگوریتم عوارض کوچک و بزرگ جداگانه کشف می شوند . عوارض بزرگ با قطعه بندی ابرنقاط و عوارض کوچک با نرم سازی ابرنقاط کشف می شوند.
الگوریتم حد آستانه
در این روش (F.F.tang:2008) با در نظر گرفتن اختلاف ارتفاع بین پالس اولیه ثانویه و اولیه به عنوان حد آستانه توانستند تا حدودی نقاط زمینی را از نقاط پالس ثانویه استخراج کنند اما با توجه به شیب ناشی اززمین بیشتر تاج پوشش نزدیک به زمین طبق این حد آستانه حذف نمی شود و برای حذف آنها می بایست از معیار تنوع ارتفاعی استفاده کرد.
از آنجاییکه سیستم لیدار علاوه بر ثبت پالس اولیه و ثانویه توانایی ثبت پالس تکی را دارد ، در این روش ، روشی برای استخراج نقاط زمینی از نقاط پالس تکی نیز ارائه شده است به این ترتیب که ، نتایج حاصل از دو فیلترینگ قبل را دریک صفحه قرار می دهیم و سپس نقاط پالس تکی را به صفحه قرار می دهیم و سپس نقاط پالس تکی و نقاط حاصل را محاسبه می کنیم ، حال اگر اختلاف ارتفاع نقاط کوچک تر از حد آستانه تعریف شده باشد می توان نقطه پالس تکی مربوطه را به عنوان نقطه زمینی درنظر بگیریم.
الگوریتم طبقه بندی به روش SVM
در این الگوریتم (M.Salah and J.Trinder:2009) که بر پایه طبقه بندی به روش SVM است علاوه بر داده های شدت و فاصله لیدار، از عکس رنگی هوائی منطقه و نیز لایه هایی که آنالیز بافت تصاویر فوق بدست آمده اند ، استفاده می شود. در این روش ابتدا تصاویر به ۴ کلاس جاده ، چمن، ساختمان و درخت طبقه بندی می شوند سپس کلاس های جاده و چمن به عنوان کلاس زمین و کلاس های ساختمان و درخت به عنوان کلاس عارضه برچسب می- خورند .
الگوریتم BVMS
این الگوریتم (Baligh et all :2011) ازتکنیک طبقه بندی شبکه های عصبی استفاده کرده است.
ابتدا با استفاده از معیارهایی بر اساس شیب تعدادی نقاط زمینی و معیار اختلاف بین بازگشت اول و آخر تعدادی نقاط عارضه شناسائی می شوند و از آنها به عنوان نقاط آموزشی شبکه عصبی استفاده می شود و سرانجام نقاط لخت زمین و عارضه با استفاده از این شبکه عصبی طبقه بندی می شوند.
الگوریتم ( H.Amini:2014 )
برای استخراج مدل رقومی زمین روشی را ارائه کرد که شامل سه مرحله می باشند .
مرحله اول نویز موجود در داده ها حذف و بادرونیابی بانزدیکترین همسایه جایگزین گشت.
درمرحله دوم باتعیین یک نوار جستجو ، کل تصویر در راستای عمودی و افقی برای استخراج مدل رقومی زمین اسکن گردید و با یافتن کمینه در هر نوار و مقایسه نوارها ، نقاط تغیر شیب استخراج شده و به مدل رقومی زمین اعمال شد و در مرحله سوم نیز با اعمال فیلتر گشایش مورفولوژی نتایج بهبود یافت ، که با استفاده از این روش می توان نقاط پالس اولیه را از نقاط پالس ثانویه به خوبی جدا کرد.
الگوریتم (P.Pahlavani:2015)
پرهام پلوانی و همکاران برای استخراج مدل رقومی زمین ازروش شبکه عصبی پیش خورنده استفاده کردند.
روش انجام شده آنها سه مرحله داشت :
در مرحله اول روندی ابتکاری برای استخراج مدل رقومی زمین.
مرحله دوم شامل تعیین چند لایه توصیف گر بهینه ، گردآوری داده های آموزشی از لایه های توصیف گر و استفاده از شبکه عصبی پیش خورنده ( feed forward ) با استفاده از الگوریتم پس از انتشار ( back propagation ) برای شناسایی معابر و ساختمان های درون شهری است.
در مرحله سوم با انجام پس پردازش روی نتایج شناسایی انجام شده ، اقدام به افزایش دقت و صحت نتایج کردند.
الگوریتم ATIN
پایه این روش (salleh et all :2015) شبکه نامنظم مثلث بندی تطبیقی ATIN است.
این الگوریتم بر اساس فاصله نقاط بر روی سطح و تهیه یک TIN نقاط زمینی را از مجموعه نقاط لیدار جدا می کند.
[box type=”shadow” align=”” class=”” width=””]همچنین بخوانید:










{kind=link}